ECS accessory control network
こんにちは。専務の藤井です。
ラニーニャ現象が関係しているのか、最近はどんどん寒くなってきていますね。
そんな中、先日、寒さに負けず6R10エンジンのECS適合を実施してきましたが、おかげさまで(http://www.irs-japan.com/?p=5661)のように満足のいくレベルまで熟成させることができ、さぁ、これで一休み。と言いたいところなのですが、そうもいかない様子です。
というのは、性能を含めた本格的・戦略的なエンジン適合のニーズがとある方面から出始め、燃料噴射系によるエンジン自体の駆動に加えて、EGRバルブやターボなどの補器類の制御が急務になりつつあるためです。
とはいえ、燃料噴射系の制御に比べれば、この手の制御は簡単なので大して慌てませんが、今後の拡張性を考慮して、制御システムのコンセプトは固めておく必要があります。
以前は、アクチュエータといえばとりあえずソレノイドだったのですが、最近のエンジンでは、排ガス規制の強化に伴い補器類のアクチュエータ仕様が多種多様となっています。
例えば、同じEGRバルブでもソレノイドタイプもあればDCモータータイプもありますし、ターボや尿素添下システムなどには、そもそもアクチュエータ自体が自らを制御するような、いわゆるスマートアクチュエータなども散見します。
なので、これらすべての駆動回路をECS制御ユニットに組み込むと大変なので、まずECS制御ユニット経由で制御PCにエンジンの状態を示す信号を送り込み、これをアクチュエータ制御用のコントローラ(Active Controller)に集約させた後、それぞれのアクチュエータに合ったドライバーを個別に制御する方法を採用しようと考えています。
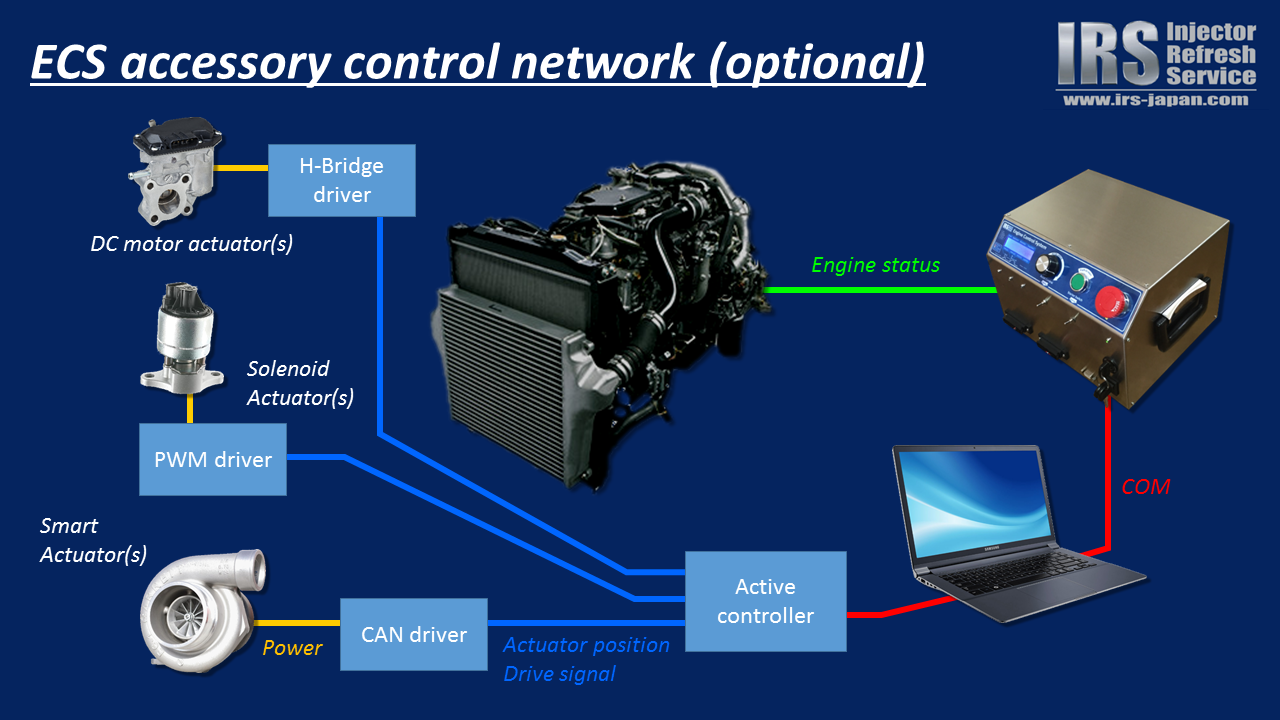
これは、以前FBでちょっと触れたクラスターコントローラの概念なのですが、それをさらにエンジン駆動用に特化させたものという感じですね。
この手法によるメリットは様々ですが、一番のメリットは、駆動回路を後付けできるためアクチュエータの種類や数を自由に設定でき、新規のエンジンや開発段階のエンジンの制御にかかる労力を大幅に低減できる点です。
ということで、コンセプトも固まったところで、さっそくソフトウェアの開発から着手します。